プロフィール
職歴
| 2020.4 — 現在 |
新居浜工業高等専門学校 機械工学科 准教授 |
|---|---|
| 2016.4 — 2020.3 |
新居浜工業高等専門学校 電子制御工学科 助教 |
| 2015.4 — 2016.3 |
日本学術振興会特別研究員(DC2) |
学歴
| 2016.3 | 奈良先端科学技術大学院大学 情報科学研究科 情報科学専攻 博士後期課程 修了 (主指導教員: 杉本謙二教授) |
|---|---|
| 2013.3 | 奈良先端科学技術大学院大学 情報科学研究科 情報科学専攻 博士前期課程 修了 (主指導教員: 杉本謙二教授) |
| 2011.3 | 新居浜工業高等専門学校 専攻科 電子工学専攻 修了 |
海外経験
| 2014.10 | Visiting Scholar, Centre for Autonomous Systems, Faculty of Engineering and Information Technology, University of Technology, Sydney, Australia (Host: Prof. Jaime Valls Miro) |
|---|
受賞
| 2011.3 | 平成22年度 電気学会・電子情報通信学会・情報処理学会 四国支部奨励賞 |
|---|---|
| 2012.12 | 第55回自動制御連合講演会 優秀発表賞 |
| 2013.7 | 平成25年度奈良先端科学技術大学院大学優秀学生 |
| 2014.9 | IEEE Robotics and Automation Society Japan Chapter Young Award [Link] |
| 2015.9 | RSJ/KROS Distinguished Interdisciplinary Research Award |
| 2018.1 | 平成29年度 新居浜工業高等専門学校 優秀教員 |
| 2021.1 | 令和2年度 新居浜工業高等専門学校 優秀教員 [link] |
| 2021.11 | 令和3年度 新居浜工業高等専門学校 最優秀教員 [link] |
所属学会
- The Institute of Electrical and Electronic Engineers (IEEE)
- 計測自動制御学会
- システム制御情報学会
- 電子情報通信学会
- 日本ロボット学会
プログラミングスキル
- MATLAB, Python, C++, Visual C++, Visual Basic, OpenGL, TeX
- 上記言語とRobot Operating System (ROS)との組み合わせによるロボットシステムの構築
主な研究テーマ
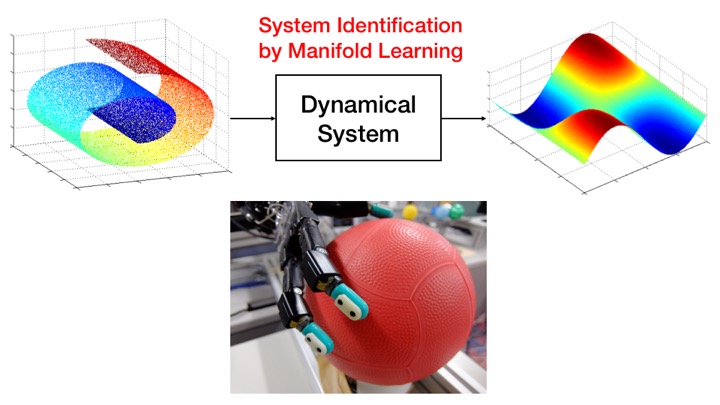
多様体学習を用いた高次元入出力システム同定
非線形次元削減法である多様体学習を用いて、動画や音声など高次元時系列データに有効なシステム同定法を研究しています。
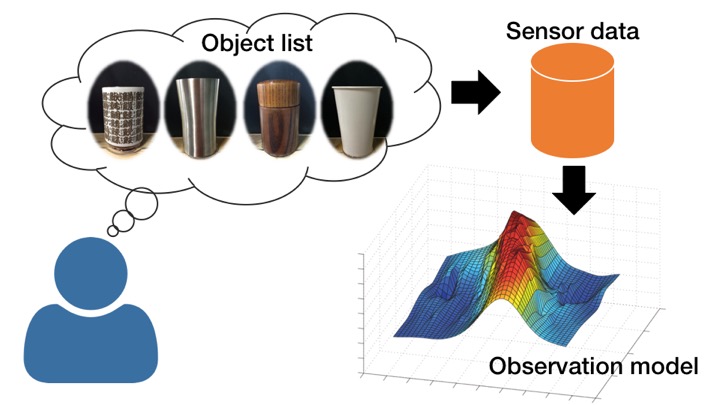
能動的探索行動設計のための観測モデル生成
実環境でも頑健に稼働するロボットが求められています。我々はロボットが活動する際に必要な環境認識技術について、物体認識問題を例題として研究しています。一般に効率の良い環境認識技術には,環境とセンサ情報の関係を記述する「モデル」が必要となります。そのような環境認識のためのモデルをセンサデータから学習する機械学習技術について研究開発しています。
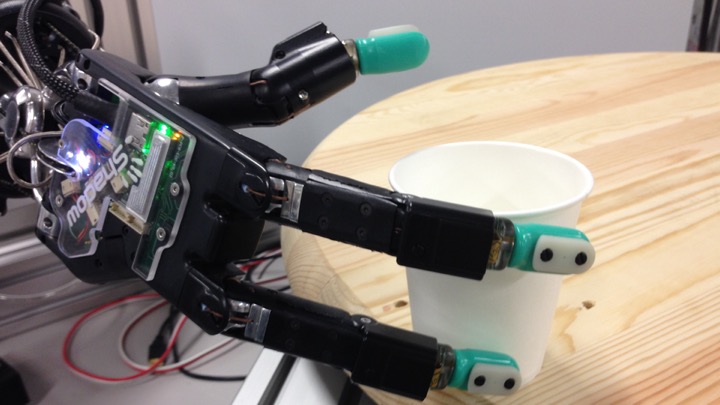
最適制御理論と情報理論的基準を組み合わせたロボットの行動設計
ロボットハンドの触覚センサから情報を取得して環境を認識する場合、認識の不確実性の減少に有効で、対象を壊したりしないように配慮した「触り方(タッチ)」を実現することが重要です。我々は、そのような最適なアクティブタッチに向けたロボットの制御技術について研究・開発しています。
研究分野(Keywords)
- 知能ロボティクス
- 機械学習
- システム同定
- (統計的)信号処理
- 音楽情報処理(自動採譜,楽器音分離)